
Project Good Karma
Project Good Karma is essentially a crowd funded project provided to support the abandoned GoPro Karma online community as a recreational project. TES (Tennovative Engineering Solutions) was not contracted or paid for design or consultation services to develop the hardware or software solutions related to this project. Services were provided free of charge while the hardware solutions was priced at 12% over material costs to the purchaser. The 12% covered the sales tax exposure of TES with applicable PayPal sales fees. Initial fees were calculated at 8% but were adjusted later as 8% was determined to be insufficient to cover applicable sales tax exposure.
Background Information
Production of the GoPro Karma drone ended in January 2018, and the product entered its end-of-life support phase in February 2021 with a formal announcement from GoPro. Unfortunately, the final firmware update released by the company had the unintended side effect of bricking a significant number of Karma drones in the field. The issue corrupted the bootloader for the DMSoC (Digital Media System on Chip), preventing it from booting properly. This presented to the user as a failure of the drone to pair with its controller.
Although the root cause of the failure remains unknown, the outcome was consistent: many drones were rendered unusable. For several years, the affected units were grounded with no solution in sight.
In November 2023, a YouTube video describing and demonstrating a method to repair the corrupted bootloader was posted. However, the process was fairly involved and required technical knowledge and soldering skills.
After performing the fix on several drones and closely studying the Karma PCB and components, the process was evaluated for simplification and automation. The result of this effort became Project Good Karma.
About the design
At the time of development, repair options were very limited in the contiguous US.
Given the technical barriers that were present in the original process, the desire was to simplify the process to promote those less technical in the GoPro Karma community to get involved with repairs. The only way this goal seemed feasible was to simplify the process by removing the complexity and minimizing the equipment requirements.
The Good Karma Kit was developed with the following design goals in mind:
- The design should capture all of the required hardware needed for the repair.
- The design should limit the risk of damage to the Karma mainboard.
- The design should eliminate the need to solder or any specialized equipment.
- The process should be simple; either semi or fully automated.
- The process should be well documented.
Most of these design goals were realized. Some limitations were imposed given the reception by the GoPro Karma community. The decision was made to keep the process semi-automated because initial discussions within the community leaned in that direction. Trust is always a concern, and software that removes user or owner control is rarely well received. Allowing users to maintain even the perception of control helps them feel more comfortable with an application, especially when it comes from an untrusted source.
(Automation paradox: “The theory is simple: the more automation relieves human beings of exposure to challenging work, the less accomplished at that work human beings will become.”)
The project is broken into the following parts:
- Electrical Design – ECAD (Altium Designer)
- Mechanical Design – MCAD (Fusion 360)
- Software Design – WPF C# (Visual Studio)
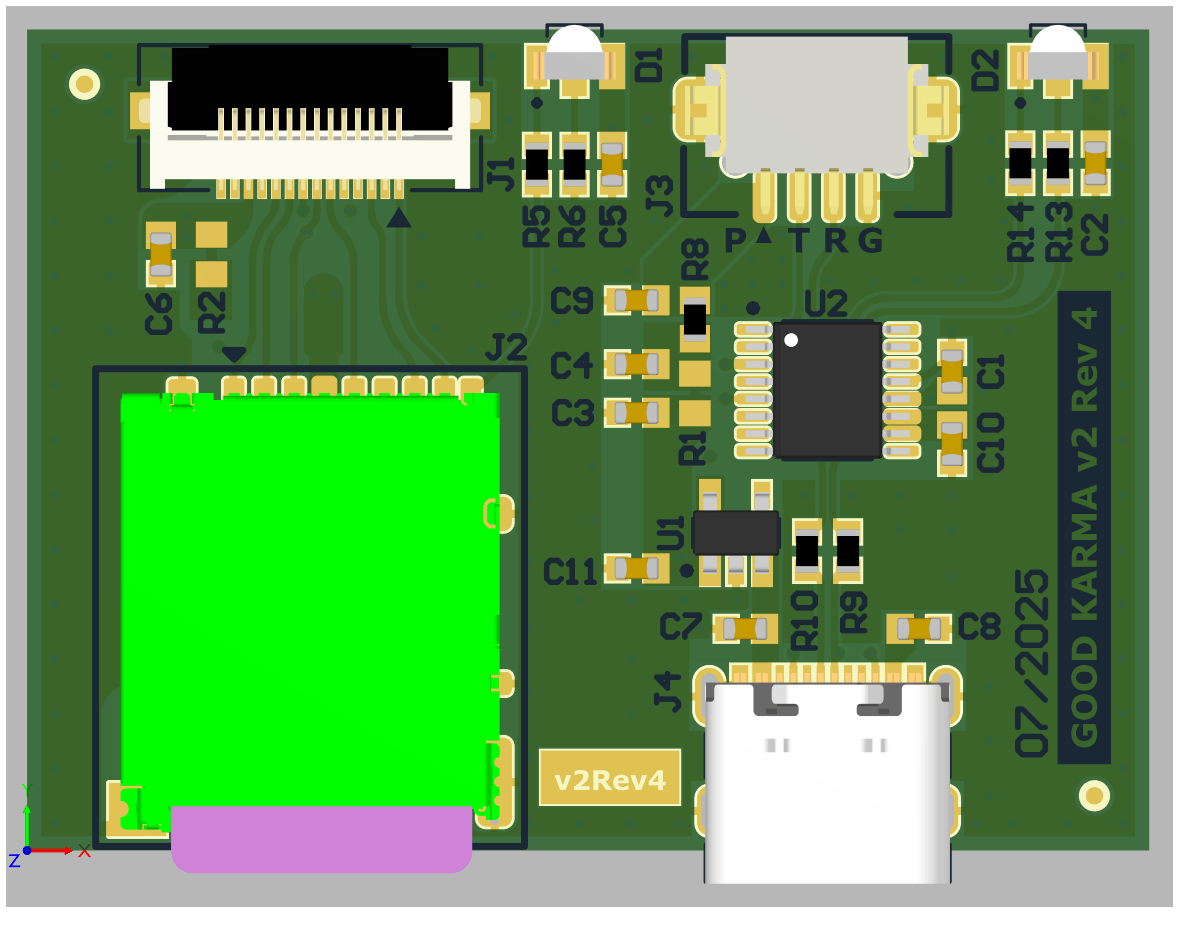
ELECTRICAL DESIGN
The PCB design is comprised of the following functions:
- USB Type C to TTL adapter
- High precision 3.3V LDO supply (<2.5% output deviation)
- microSD card to 14-pin 0.5mm pitch FFC adapter


FABRICATION
The PCBs were fabricated by a third party board house. All assembly and testing of the PCBs and cable assemblies was done in the TES home office. All functionality was verified prior and post assembly into the 3D printed enclosure.
ECAD Design vs Reality

Split from fabrication panel for individual inspection.

Assembly and preparation for testing.

MECHANICAL DESIGN
Hardware Enclosure
The enclosure was designed in Fusion 360 to both capture the PCB hardware as well as provide a stable mount for attachment to the Karma drone. A standard slot design was used for capturing the board in the enclosure. The mount design was accomplished with a u-shaped clip feature that secures the hardware onto the drone arm. If the hardware is securely attached to the drone there is very little risk to the cable being ripped away from the drone mainboard during operation.




Probe Guide
The probe guide mechanical design was created to support the repair process. The kit employs a microprobe to inject voltage onto a configuration resistor for the DMSoC to trigger the “boot from SD” function of the chipset. The resistor is quite small (0402) and can be difficult to probe normally without the use of magnification and a steady hand. The probe guide was designed to assist with probing the small resistor terminal.


SOFTWARE DESIGN
The software design serves two major purposes. It automates the process to resolve the pairing/corrupt bootloader issue as well as the WMM (World Magnetic Model) update process. It does so by monitoring the data received over the USB to TTL adapter. It evaluates the receiver buffer for key terms that are used as context driven triggers for command injection. Once the boot mode is identified and key terms detected, the application enables UI buttons that allow the user to inject commands into the drone to perform the required actions needed to achieve the desired goal.
The application was written with the expressed purpose to simplify the update process. The application is not hardware locked and will support any hardware solution built or purchased to facilitate the repair. However, the application does treat the TES Good Karma kit differently as it will automatically detect and select the proper COM port for the TES hardware solution.

Project Reach
Over 400 units were built and shipped both domestically and internationally. During the two-year period in which these kits were produced and distributed, hundreds of additional drones were repaired and returned to service thanks to the simplicity of the kit and the support of the broader community.
Each kit shipped with a test report and a quick reference card with QR links to the User Guide and YouTube links.
The following map represents a good portion of the kits that were shipped. It does not reflect the entire reach of the project as there have been more than 100 additional kits shipped since the map was generated. The additional kits were built to target areas of the globe with limited repair coverage.
